
NOS RECHERCHES
Robots et capteurs : le vignoble 2.0
Objectifs
L’objectif du projet Vignoble 2.0 est de faciliter l’arrivée des nouvelles technologies au vignoble (capteurs, drones, robots) par leur présentation et leur mise en situation dans des cas concrets permettant de qualifier et quantifier les gains apportés. L’atteinte de cet objectif passe par plusieurs étapes de travail:
- Démonstration, transfert de technologies et tests grandeur nature
- Présenter, faire connaitre et diffuser les capacités des robots viticoles
- Sélectionner différentes solutions innovantes, les expérimenter dans plusieurs situations qui deviendront des sites vitrines, plateformes pour les nouvelles technologies au vignoble à l’issue du projet
- Valoriser les informations fournies par ces technologies la mise en place d’opérations au vignoble
Premiers résultats
Les différentes solutions existantes (robotique, drones, capteurs) ont été présentées aux partenaires du projet et aux vignerons associés. Trois types de technologies sont étudiées : cartographie, robotique et autoguidage. Les premières années du projet ont permis de récolter de l’information par les technologies utilisées et de trouver des solutions afin de valoriser ces informations pour l’utilisateur final.
Pour la cartographie, la connaissance des parcelles par la mesure de différents paramètres à l’aide d’un drone (NDVI, manquants) à permis de réaliser une caractérisation l’hétérogénéité intra-parcellaire. Cette information peut ensuite donner lieu à une fertilisation différenciée par zone ou permet de caractériser la qualité du raisin sur différentes zones et ensuite procéder à une récolte sélective.
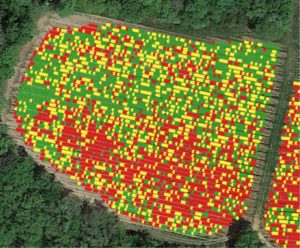
Cartographie d’une parcelle. Deux zones distinctes en fonction de la vigueur de la vigne : en haut la zone A, en bas la zone B. Cette connaissance de la parcelle peut donner lieu à des actions différenciées : fertilisation ou récolte sélective.

Le robot TED en test dans les vignes


![]()